




看了又看
-
¥38.00 ¥76.00
-
¥45.00 ¥90.00
-

¥260.00 ¥520.00
-

¥220.00 ¥440.00
-

¥800.00 ¥1600.00
-

¥290.00 ¥580.00
-

¥3800.00 ¥7600.00
-

¥2200.00 ¥4400.00
-

¥288.00 ¥576.00
-

¥550.00 ¥1100.00
产品特点
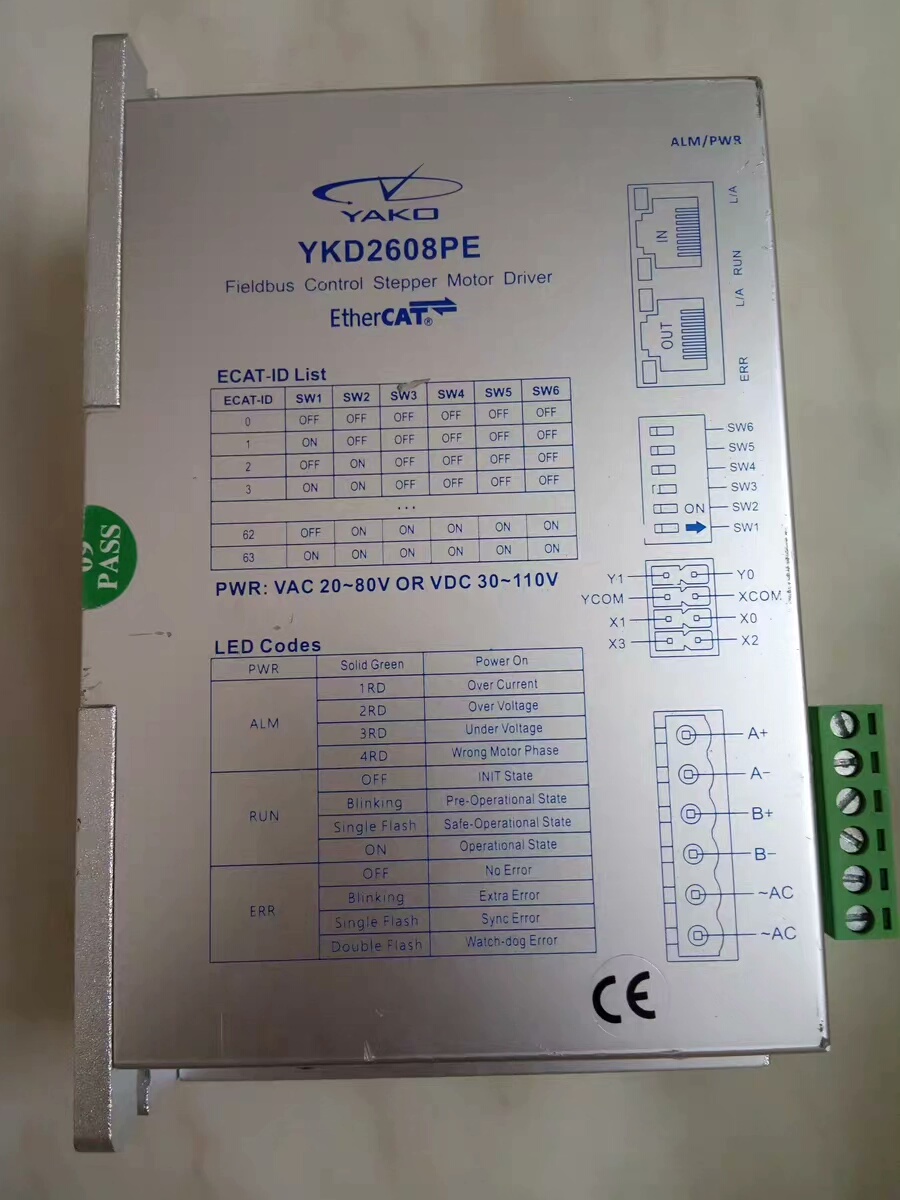
YAKO YKD2608PE闭环型混合伺服驱动器是一款高性能运动控制产品,具备以下核心特点:
- 闭环控制技术:采用高精度反馈机制,实现位置、速度、扭矩的精确控制,提升系统定位精度与运行稳定性。
- 混合伺服设计:融合步进电机与伺服电机优势,兼具高 torque 输出与快速动态响应,适用于中低负载精密传动场景。
- EtherCAT总线通信:支持EtherCAT工业以太网协议,通信速率高、周期短,可实现多轴同步控制,满足复杂自动化系统需求。
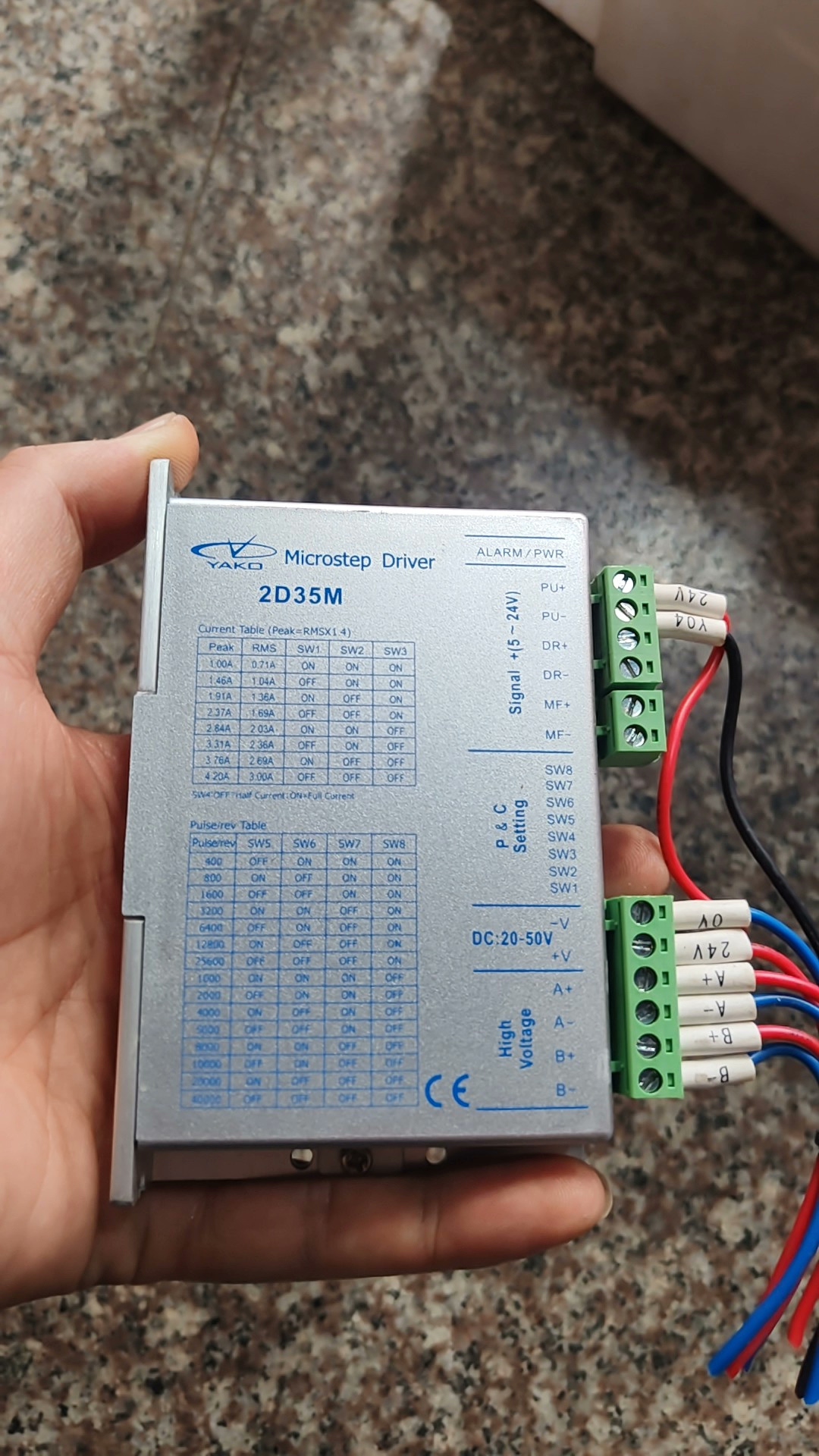
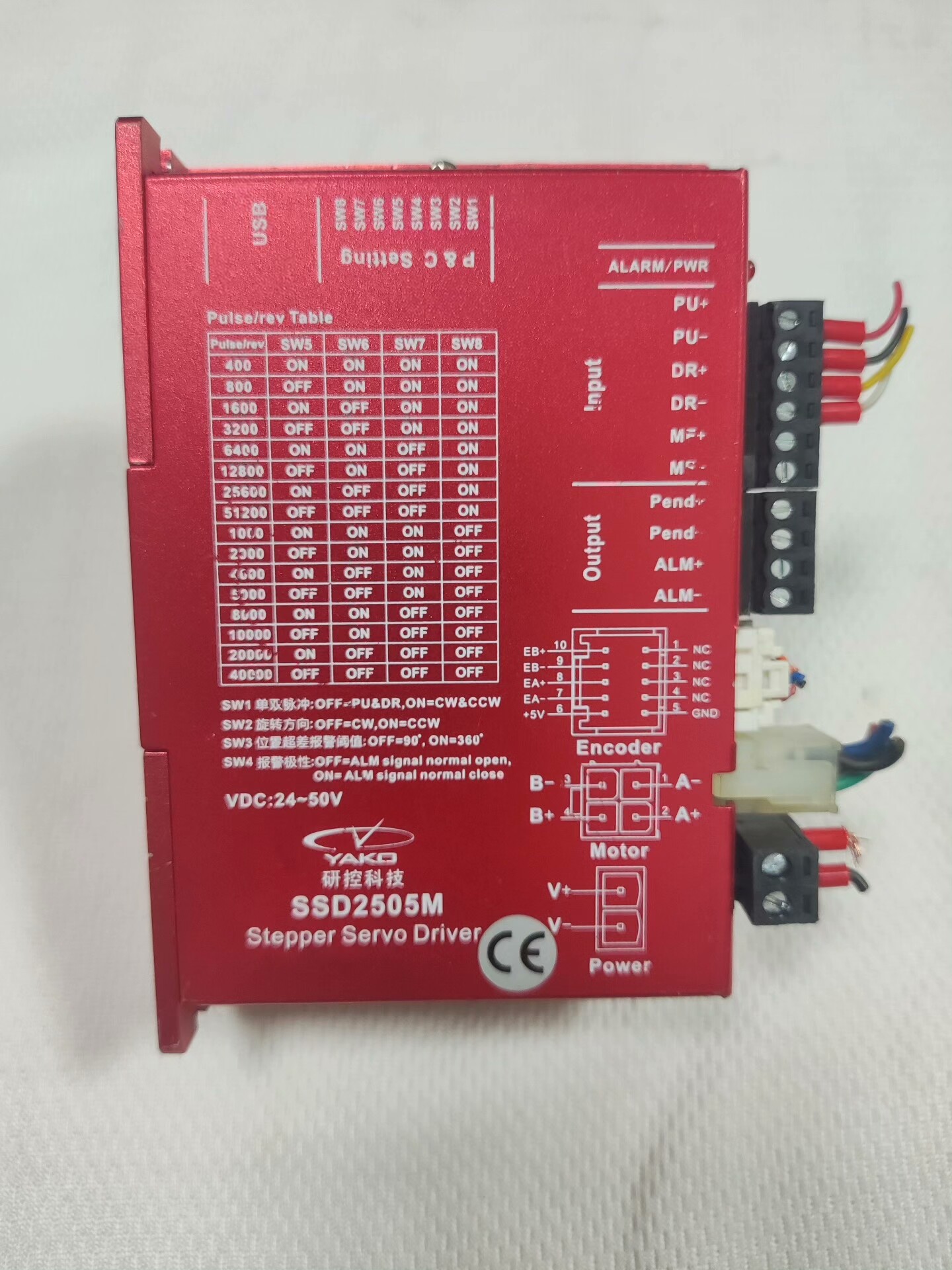
- 丰富接口配置:配备双EtherCAT接口(IN/OUT),支持总线级联;数字I/O接口(X0-X4输入、Y0-Y1输出),方便连接外部传感器与执行器;电机接口采用标准端子,接线便捷。
- 紧凑结构设计:小巧机身节省安装空间,附带金属安装支架,适配导轨或面板安装,提升设备集成度。
应用场景
该驱动器广泛应用于各类自动化设备与精密运动控制系统,典型场景包括:
- 数控机床、雕刻机等精密加工设备的进给轴驱动
- 自动化生产线的物料搬运、定位机构
- 电子半导体设备的芯片检测、封装工序
- 机器人关节、坐标机械手的运动控制
- 医疗设备、实验室仪器的高精度位移调整
技术参数概览
- 控制模式:位置/速度/扭矩闭环控制
- 通信接口:EtherCAT总线(支持CoE协议)
- 数字输入:4路(X0-X4),光耦隔离
- 数字输出:2路(Y0-Y1),集电极开路
- 电机接口:A+、A-(编码器信号),B+、B-(电机动力)
- 辅助电源:+5V(为外部传感器供电)
- 工作温度:-10℃~50℃(无凝结)


-

¥160.00 ¥320.00
-

¥260.00 ¥520.00
-

¥200.00 ¥400.00
-
¥1000.00 ¥2000.00
-
¥3500.00 ¥7000.00
-

¥1800.00 ¥3600.00
-

¥500.00 ¥1000.00
-

¥22.00 ¥44.00
-

¥480.00 ¥960.00
-

¥1680.00 ¥3360.00
-

¥700.00 ¥1400.00
-
¥580.00 ¥1160.00
-

¥2222.00 ¥4444.00
-

¥88.88 ¥177.76
-

¥60.00 ¥120.00
-
¥5500.00 ¥11000.00
没有评价数据